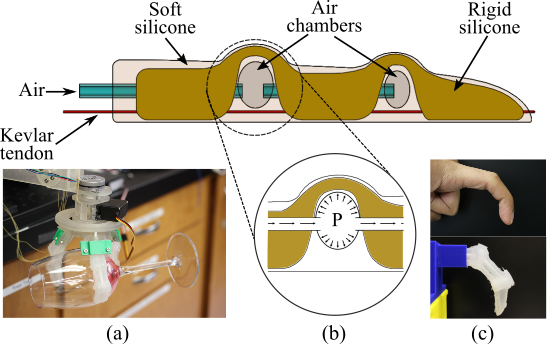
Design of soft composite finger: (a) robotic hand made up of three soft composite fingers holding a fragile daily-life object. (b) section view of pressurized chamber in the joint. (c) soft composite finger similar to human finger.
This research presents the design of a soft composite finger with tunable joint stiffness. The composite finger, made from two different types of silicone, has hybrid actuation principle combining tendon and pneumatic actuation schemes. Tendons control the finger shape in a prescribed direction to demonstrate discrete bending behavior due to different material moduli, similar to the human finger’s discrete bending. Whereas, pneumatic actuation changes the stiffness of joints using air chambers. The feasibility of adjustable stiffness joints is proven using both the parallel spring-damper model and experiments, demonstrating the stiffening effect when pressurized. A set of experiments were also conducted on fingers with four different chamber designs to see the effect of chamber shape on stiffening and the discrete bending capability of the finger. These stiffened fingers lead to firm grasp as they constrain the object better and apply higher grasping force. The gripper made up of soft composite fingers can grasp objects of various sizes, shapes and in different orientations.
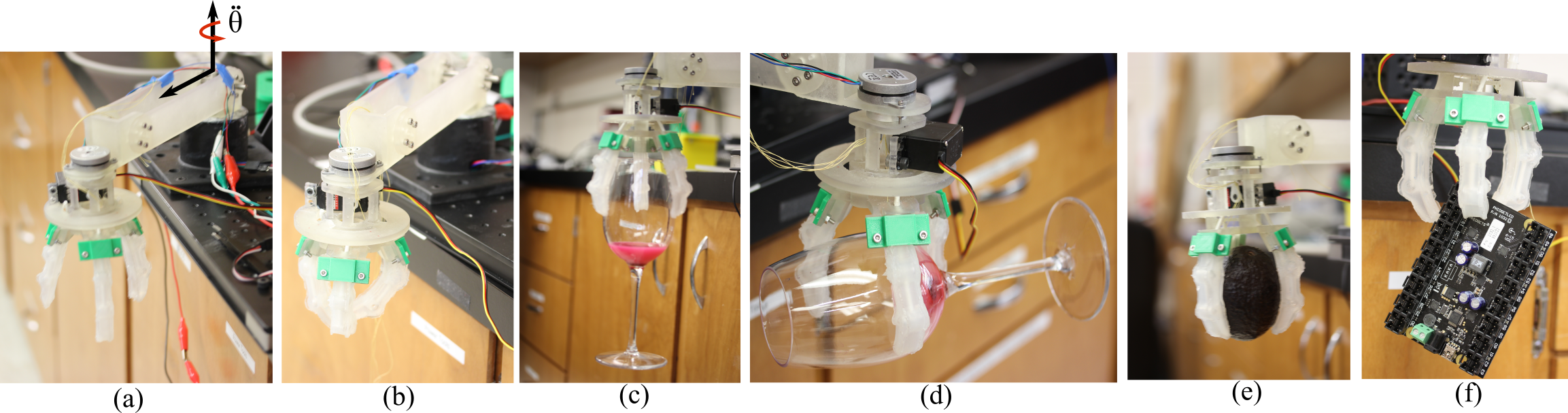
The designed gripper can grasp various size(diameter from 20mm to 100mm) and shape objects such as circular, rectangular, oval, cylindrical, etc. at different orientations. (a) Soft gripper (b) Actuated soft gripper (c) Wine glass (d) Wine glass grasped in a different orientation (e) Avocado (f) Microcontroller board.